



기술지원 FAQ
1. 우선 AFM controller의 analog cable과 XY scanner cable이 확실히 연결되었는지 확인 합니다.
2. XEP의 Trace mode를 실행시켜 Servo Off, On 상태에서 XY sweep test를 하고 Sweep test시 Vision 창을 통해 XY scanner의 움직임을 관찰합니다. (Trouble shooting guide_ver1.1.1 참조)
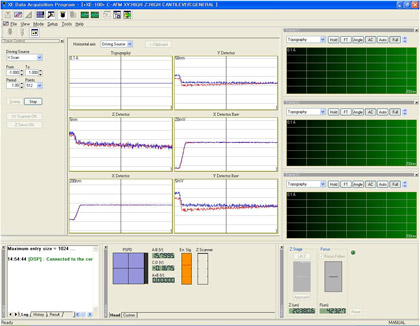
3. Servo Off 상태에서 XY scanner의 움직임이 Vision 창에서 정상이고 Trace mode window 에서 Signal이 비정상이면(가운데를 중심으로 Signal이 출력되지 않고 한쪽으로 치우치면) Servo On일 때 Vision 창에서 비정상적인 움직임을 보이고 Trace mode window에서도 한쪽으로 치우쳐진 비정상 Signal이 나타난다. 이런 경우 대부분 XY scanner의 Hardware Offset이 틀어져 있어 발생한다. AS접수하여 Hardware Offset을 맞추는 서비스를 받는다.
4. Servo Off상태에서 XY scanner의 움직임이 Vision창에서 정상이고 Trace mode window에서 Signal이 정상인데 Servo On일 때는 비정상인 움직임과 Signal이면 Electronic의 Feedback loop에 문제가 발생한 것으로 Base board 또는 Interface board를 수리해야 한다.
5. Servo Off 상태에서 XY scanner의 움직임이 Vision 창에서 비정상이고 Trace mode window에서 Signal도 비정상이면 XY scanner에 문제가 발생했거나 Electronic에 문제가 발생한 것이다. 우선, XY scanner를 분리하고 AFM controller cover를 벗긴 후 Trace mode에서 문제의 방향으로 Driving 시킨 후 High voltage board Input power(163V), driving signal(Set signal: ±10V, HV output signal:-10V~140V)를 점검하여 정상여부를 판단하고 불량이면 해당 Part(High voltage board, Baseboard, Interface board, APS board 등)를 AS 접수하여 수리 받는다. AFM controller가 정상이면 분리해 놓은 XY scanner에서 움직이지 않는 방향 PZT의 Capacitance(1.5uF/ea) or resistor(MΩ)를 측정하여 정상여부를 판단하고 불량PZT일 경우 XY scanner를 AS 접수하여 수리 받는다. AFM controller와 PZT 모두 정상일 경우 XY scanner 분리 상태에서 Trace mode에서 문제의 방향으로 Driving 시킨 후 XY scanner cable connector의 Pin map(XE:1, 2,5,6번 , NX:21,22,23,24번 )에서 Driving signal을 측정하여 정상Signal이 나타나면 XY scanner board의 불량이며 불량Signal이 나타나면 Analog cable, XY scanner cable의 연결상태 불량이거나 Analog cable, XY scanner cable, Frame board 불량이다. 해당 불량 part를 수리 받는다. (Trouble shooting guide_ver1.1.1 참조)

갑작스럽게 구동이 되지 않는 경우에는 Main body에 연결 되어 있는 motor cable과 AFM controller에 연결 되어 있는 motor cable을 다시 한번 확인하여 주시기 바랍니다. 이후에도 작동이 안되신다면 문제 발생 시점과 XEP의 output 창에 뜨는 error 메시지를 확인하여 CS@parkAFM.com으로 보내주시면 답변 드리도록 하겠습니다.
1. Laser align을 정상적으로 하였음에도 불구하고 approach가 힘들 정도로 A-B, C-D drift가 심할 경우 approach 전 Acoustic Enclose 닫은 후 10분이상 경과 후 다시 시도 바랍니다. 이후에도 증상이 계속 된다면 Cantilever를 NCHR로 변경하고 Approach를 진행 바랍니다.
2. Sapphire Wafer, Glass 샘플의 정전기 요인이 있을 수 있을 경우 습도 조절이나 Ionizer 사용이 필요합니다. (Sample로 인한 정전기 확인은 Metal disk에 부착 된 standard sample에 approach 여부를 확인 바랍니다.)
3. Non-Contact mode에서 approach가 안되는 경우 NCM sweep 설정 및 parameter 설정 오류(amplitude, set-point)문제가 있는지 확인이 필요하며 특이 사항 없을 경우 Contact mode로 변경하여 approach를 시도합니다.
4. Contact mode에서 approach가 안되는 경우 probe hand, frame board 문제일 수 있으니 XEP의 output창 메시지를 확인하여 CS@parkAFM.com으로 보내주시면 답변 드리도록 하겠습니다.
* 당사가 제공하는 Pre-align된 Cantilever를 구입하여 사용하는 것을 권장합니다.
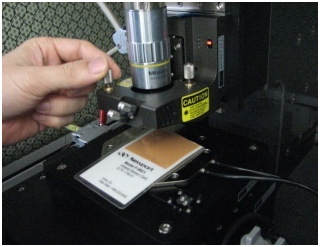
1. 먼저 Head cable 및 Analog cable을 다시 체결 해주시기 바랍니다. Head mirror와 PSPD sensor에 이물질이 묻어 있을 수 있으니 cleaning 작업을 해보시기 바랍니다. 그런 다음 새로운 Cantilever로 교체한 뒤 다시 한번 laser spot을 tip 위에 align해 보시기 바랍니다.
2. Head PSPD screw가 헛돌지는 않는지 PSPD Block의 ball이 빠져 있지 않은지 확인 바랍니다. 만약 Spring이나 ball이 없다면 CS@parkAFM.com을 통해 수리 접수 바랍니다. (주의- PSPD screw를 과하게 돌리면 안쪽의 spring이나 ball이 빠질 수 있습니다.)
3. PSPD block의 문제가 아니라고 판단되면 형광등이나 핸드폰 빛을 PSPD sensor 쪽으로 비추어 PSPD laser가 나오는지 확인(A+B값 증가)하시기 바랍니다. 만약 Software 화면상에 PSPD laser가 나오지 않으면 sensor, SLD, LD등의 고장 원인으로 파악되오니 CS@parkafm.com으로 AS접수 바니다.
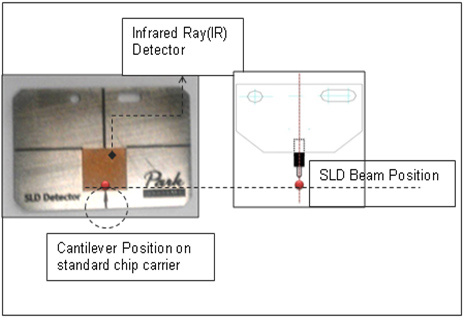
4. Infrared Ray Detector를 사용하여 laser 위치를 찾고 그림의 빨간점 표시에 laser spot을 위치시킨 후 Infrared Ray Dector를 제거하고 Mounted cantilever를 Probehand에 붙이면 laser beam spot을 정확히 cantilever에 위치시킬 수 있습니다. 그림 참조 바랍니다.
1. Controller의 cable 및 power ON상태를 확인 바랍니다.
2. LAN cable이 Computer와 Controller에 정상적으로 연결(LAN card 연결 상태 확인, 2개의 LED 점등상태)되어 있는지 확인 및 재연결 해보시기 바랍니다.

3. (2)와 같이 점등확인이 되었다면 IP주소 확인 바랍니다.

4. (1)(2)(3)와 같은 방법으로 해결 되지 않을시에는 Controller 문제로 판단되오니 CS@parkafm.com AS 접수 바랍니다.
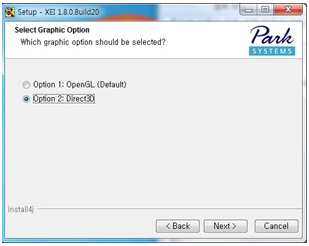
XEI>File>Preference에서 Render 설정이 "Open GL" 또는 "Director 3D"로 설정되어 있는 것을 서로 바꾸어서 실행해 보시기 바랍니다.
1. Cable 연결상태 확인 및 재연결 시도 바랍니다.
정상작동
Cable 연결안됨
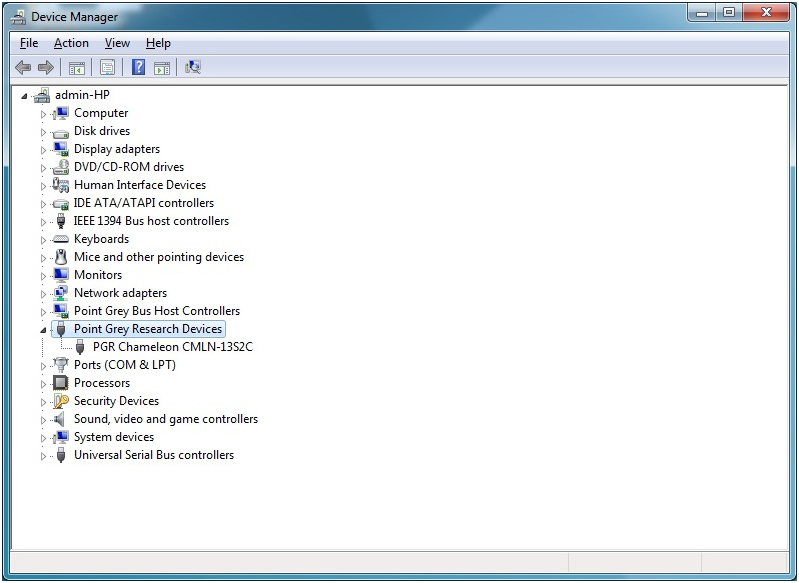
2. USB port가 USB 2.0(USB 2.0=검정색, USB 3.0=파란색)인지 확인 바랍니다. 정상적으로 연결되었다면 그림과 같이 장치 관리자에서 USB 정보 확인할 수 있습니다. 만약 올바르게 장착하였으나 그림과 같이 표시가 되지 않는다면 Camera Software를 재설치 바랍니다.
1. Camera software에서 밝기 조절이 되는지 확인을 하고 PSPD의 A+B값이 출력이 되는지 확인을 바랍니다. 만약 출력이 되지 않는다면 Cantilever가 부러졌을 가능성이 높으니 Cantilever를 교체 바랍니다.
2. Focus stage, Z stage를 각각 reset 시키세요. 만약 Cantilever에 focusing 되지 않았던 문제라면 Z stage reset 할 때의 화면을 보면 Cantilever가 지나가게 됩니다.
3. 아래 그림에서 표시된 부분의 앞쪽 부분인 상하 screw만 돌려서 Cantilever 찾아 봅니다. 대부분 완전히 틀어 지지 않은 이상 원래 위치해 있습니다. 만약 완전히 틀어진 경우에는 Cantilever 보다 크기가 큰 Chip carrier 부분을 찾아 봅니다. 좌우는 반 바퀴정도 돌려 주고 상하는 완전히 조였다가 풀어주는 것을 반복합니다.
그림에 표시된 Knob가 잠겨져 있는 상태인 경우 Y축은 앞쪽으로 움직이지 않고 X축은 오른쪽 방향으로 움직이지 않습니다. 만약 풀린 상태에서도 한쪽 방향으로만 동작한다면 CS@parkafm.com으로 AS 신청 바랍니다.
1. Cantilever를 바꾸고 Frequency Sweep을 하여 Cantilever에 맞는 Resonant frequency값(NCHR 200khz~400khz)을 갖고 있는지 확인 바랍니다. Frequency peak이 double 또는 noisy 한 peak 으로 나타나면 Cantilever 손상이므로 제대로 된 image를 scan 할 수 없습니다.
2. Cantilever 상태가 이상이 없다면, Scan parameter(Set point, Scan rate, Z servo gain)은 유기적으로 feedback에 연관되어 있어 세가지 parameter들을 적절히 조절하여 Trace window의 forward/bakward line이 일치하도록 만들어야 합니다. Parameter setting 후 이미지 측정하여 forward/backward image가 일치하지 않는 경우는 parameter setting이 잘못된 경우입니다.